*** Please disconnect all 3 wires from your ESC before you start this procedure... I love to watch fail videos, but it would a shame it's because of this set of instructions...
*** Please, if you crash your helicopter because of theses instructions and feel you need blame me. 1st, don't blame me, 2nd, go buy a pre build, pre configured helicopter, ideally a Coax one because you are not ready for hardcore open source community supported hardware and software like this...Hi, after searching around and finding bits and pieces of information on how to set-up a heli with a cc3d. I offer you a more or less complete recepie on how to set it up.
For the purpose of this set-up, I am using an Align 450 Sport with a Hobby King flybarless conversion kit.
.jpg)
The servos are MKS DS92 for the swashplate and a DS95i for the tail.
The reciever is an Orange RX DSMX satellite reciever connected to the flexi port with a slight mod. (Picked up 3.3V off the board for the + on the satellite receiver)
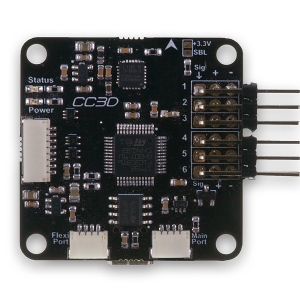
(Look on the top right of this picture where you can get 3.3V)
Here are the steps.
- I found a nice spot on the rear left of the frame at the tail boom height to stick the cc3d in it's case with dampening double sided tape. I made sure to point the USB port to the back of the helicopter.
- Connect the cc3d to the computer via usb and launch LibrePilote.
- Update the board and make sure you are running the latest firmware. Lots of how to on that...
- Tell the board how the cc3d is mounted on your frame. Since mine is 90 to the left pointing forward, I go into Configuration, Attitude, Roll. Change the value from 0 to 90. Hit Save, then hit level. Now if you go to the flight data screen, you should see everything level and the little model should move the same way you move the heli. If you board is on the right side, I would guess you can put -90 on that setting.
- Next, tell the board it's going to fly a helicopter. Under Configuration, vehicle select the helicopter. Then select CPPM 3 servo 120deg. Then, here are the settings I put for the channels. (1 is the back servo, 2 is the left servo, 3 is the right one, 4 is the tail rotor, and 5 is the engine.) Correction angle is 0, CCPM options is Collective Pass Through
- Next step is to fry your servos... No, really, you can fry your servos if you do this wrong! You need to tell the cc3d what is the range of your servos. If you go beyond the range, you can fry the servos. My suggestion is the following. Try to read up on your servos and what is their PWM rate and Range. I know that my servos are 330Hz PWM and the DS92 are happy starting at 1500 and my DS95i is happy starting at 760 and my Turnigy ESC is PWM 50Hz and happy starting at 1300. Knowing this, this is what I do 1st. I go to the Configuration, Output, Bank Channels and set this: 1(1-3) 330Hz PWM, 2(4) 330Hz PWM, 3(4,7-8) 50Hz PWM. Then in the Min and Max I set Chan 1,2,3 at (Min: 1450, Max: 1550), 4 at (Min: 700, Max: 800), 5 at (Min: 1200, Max: 1300). Once this is done, I hit save. Then I connect the ESX (MAKE SURE THE 3 Wired to the motor are disconnected... It would be bad to have the blades spin up...)
- If everyhing is setup ok, the servos should jump to a setting and then settle there without much noise. If they are forcing, the settings may not be correct for you. If everyhing is ok, check the test outputs and move the sliders a little to see if the servos move correctly.
- Now it's time to break out your swash leveling tool / pitch gauge. go to the Configuration, vehicule, swashplate leveling tab and start the process. The neutral should be 0 pitch and a level plate. Adjust the numbers to get 0 pitch and a level swash. The Max should be all the way up, level with no binding. Don't worry about the pitch. The min should be all the way down, level with no binding. (I set the pitch at 0 and eye balled the level at 0 pitch, then went to max and eye balled the level, then went to min and eye balled the level. Once this was all done, I hit finish, took off the blades and re-started the level adjustement with the level tool installed. Minor tweeks to get the swash level at all positions but the mid, high and low did not move on this adjustement. Test it out with the verify, and make sure there is no binding. Once you finish, don't forget to hit save.
- Now it's time to set the tail limits. Go to outputs, and play with the min and max of the tail to get to both ends of your tail rotor. I increased the range on the tail from 550 to 800 and set the middle at 650. Then, hit the test outputs and moved the tail slider till i find the min, max and middle. (Don't touch the elevator and rolls, you will screw up the level of the swash you just did in the previous step.) Once you know the numbers for the min, mid and max, uncheck the Test outputs and punch the numbrers in by hand and hit save.
- Now is a great time to remove the tail blades so your heli has no blades installed. This way you can setup the ESC. To do so, check the manual for your esc and try to figure out the min and max. Then, with the test outputs, set your ESC according to the instructions. You can do this by disconnecting the Battery. Then, connect the motor to your ESC. Then, with the USB still plugged in to your CC3D, punch in your min and max for the throttle. With my Turnigy, I put 1200 min, 1200 neutral, and 1800 max. Then I hit save, and checked the test outputs. Then, slid the output to the max and followed the procedure to adjust the range on my ESC. Use the slider as you would your throttle on the remote.
- Now the fun part, getting your remote to connect to the cc3d. Since I am using a satellite, I need to bind it first to my remote. To do so, go to System, Settings, HwSettings, DSMxBind and set it to 9 (You may need to put 8 or something else). Now send the setting to the CC3D with the Up Arrow and unplug the cc3d from the USB and unplug the battery. Plug back the USB only and notice the Satellite flashing. Now turn on your radio and set it to bind. Once it's bound, go back to the DSMxBind setting and put it at 0 and hit the Send button once again. You can now unplug the USB and re-plug to make sure the bind works.
- Time to set the radio up. With the radio bound, set all your output on the radio to straight curves like you would an extreme 3d setup. As an example, my radio is setup as follows. Ch1 Throttle, -100 to +100 (With throttle cut switch to -100), Ch2 -100 to +100 Ail, Ch3 -100 to 100 Ele, Ch4 -100 to 100 Rud, Ch5 0 to 100 (6 position switch in 20 increments), Ch6 -100 to 100 Throttle, Ch7,8,9 Pot 1,2,3, Ch10 Trn sw 0 or 100.
- In the CC3D setup, go to the Inputs , set all your channel type to DSMX (Or what ever you have setup) and start the transmitter setup. This should be quite easy.
Guys, I know it's not complete, but I will keep writing as I have more time...[/list]